フィードバック制御とPID制御の基礎|ゲイン調整でシステム最適化を解説
フィードバック制御とPID制御は、制御工学において重要な概念です。これらの手法は、システムの出力を目標値に近づけるために使用され、特にゲイン調整を通じてシステムの性能を最適化します。本記事では、フィードバック制御の基本的な仕組みから、PID制御における比例(P)、積分(I)、微分(D)の役割までを解説します。さらに、ゲインの適切な調整がどのようにシステムの応答速度や安定性を向上させるかについても詳しく説明します。これらの知識を身につけることで、より効率的で信頼性の高い制御システムを設計できるようになります。
イントロダクション
フィードバック制御は、制御工学において最も基本的かつ重要な概念の一つです。この手法は、システムの出力値を目標値と比較し、その偏差に基づいて入力値を調整することで、システムの安定性や精度を向上させます。フィードバック制御の最大の特徴は、外部からの擾乱やシステム内部の変動に対しても柔軟に対応できる点にあります。これにより、複雑な環境下でも安定した制御が可能となります。
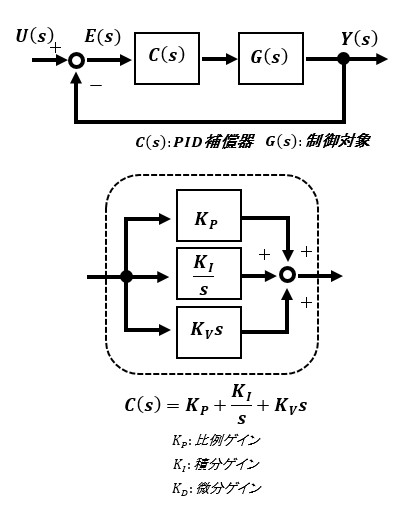
PID制御は、フィードバック制御の一種であり、特に広く利用されている手法です。PID制御は、比例(P)、積分(I)、微分(D)の3つの要素を組み合わせて制御を行います。比例制御は偏差に応じて即座に制御量を調整し、積分制御は過去の偏差の蓄積を考慮し、微分制御は偏差の変化率に基づいて未来の変化を予測します。これらを適切に組み合わせることで、システムの応答速度や安定性を最適化することができます。
ゲインは、システムの入力に対する出力の増幅率を表す重要なパラメータです。ゲインの調整は、システムの性能を大きく左右するため、慎重に行う必要があります。適切なゲイン設定により、システムの応答速度や安定性が向上し、目標値への収束がスムーズになります。逆に、不適切なゲイン設定は、システムの不安定化や振動を引き起こす可能性があります。したがって、ゲイン調整は制御システム設計において非常に重要なプロセスです。
フィードバック制御の基本概念
フィードバック制御は、制御工学において最も基本的かつ重要な概念の一つです。この手法では、システムの出力値を常に監視し、それを目標値と比較します。その結果生じる偏差に基づいて、システムへの入力値を調整します。これにより、システムの安定性や精度が向上し、目標値に近づけることが可能となります。フィードバック制御は、自動化されたシステムやロボット、産業用機械など、幅広い分野で応用されています。
フィードバック制御の核心は、閉ループ制御と呼ばれる仕組みにあります。閉ループ制御では、出力値が直接的に入力値に影響を与えるため、システムの挙動をリアルタイムで修正することができます。これにより、外部からの擾乱やシステム内部の変動に対しても柔軟に対応できるようになります。例えば、温度制御システムでは、設定温度と実際の温度の差を検出し、ヒーターの出力を調整することで、目標温度を維持します。
フィードバック制御の利点は、その柔軟性と信頼性にあります。システムが予期せぬ状況に陥った場合でも、フィードバックループを通じて適切な修正が行われるため、システム全体の安定性が保たれます。ただし、フィードバック制御を効果的に運用するためには、ゲインの適切な調整が不可欠です。ゲインが高すぎるとシステムが不安定になり、低すぎると応答が遅くなるため、最適なバランスを見つけることが重要です。
PID制御の仕組みと役割
PID制御は、フィードバック制御の一種であり、システムの出力を目標値に近づけるために広く利用されています。PID制御の名前は、比例(P)、積分(I)、微分(D)の3つの要素から構成されています。それぞれの要素が異なる役割を果たし、システムの応答特性を調整します。比例制御は、現在の偏差に比例して制御量を決定し、積分制御は過去の偏差の蓄積を考慮して定常偏差を解消します。微分制御は、偏差の変化率に基づいて未来の偏差を予測し、システムの過剰な応答を抑制します。
PID制御の最大の特徴は、これらの3つの要素を組み合わせることで、システムの安定性と応答速度を同時に最適化できる点です。例えば、比例ゲインを大きくすると応答速度が向上しますが、過剰な調整によってシステムが不安定になる可能性があります。一方、積分ゲインを適切に設定することで、定常状態での誤差を最小化できます。微分ゲインは、システムの振動やオーバーシュートを抑制する役割を担います。このように、PID制御は複雑なシステムでも柔軟に対応できる強力な手法です。
PID制御の適用範囲は非常に広く、温度制御やモーター制御、ロボット制御など、さまざまな分野で利用されています。特に、システムの動的特性が非線形である場合や、外乱が頻繁に発生する環境では、PID制御の効果が顕著に現れます。ただし、PID制御を効果的に活用するためには、各ゲインの適切な調整が不可欠です。ゲイン調整は経験や試行錯誤を要する場合もありますが、システムの特性を理解し、最適なパラメータを見つけることで、高い制御性能を実現できます。
比例(P)制御の特徴
比例(P)制御は、PID制御の基本要素の一つであり、そのシンプルさと効果の高さから広く利用されています。比例制御では、偏差(目標値と現在値の差)に比例した制御量を出力します。つまり、偏差が大きいほど、制御量も大きくなります。この特性により、システムの応答速度が向上し、目標値に素早く近づくことが可能です。しかし、比例制御だけでは定常偏差が生じることがあります。定常偏差とは、目標値に完全に一致しない状態が続くことで、これは比例制御の限界の一つです。
比例制御のゲイン(比例係数)は、システムの応答性に直接影響を与えます。ゲインが高いと、偏差に対する反応が速くなりますが、過剰な場合にはオーバーシュートや振動が発生し、システムが不安定になる可能性があります。逆に、ゲインが低すぎると、応答が遅くなり、目標値に到達するまでに時間がかかります。したがって、適切なゲインの設定が、比例制御の性能を左右する重要な要素となります。
比例制御は、そのシンプルさから多くの制御システムで採用されていますが、積分(I)制御や微分(D)制御と組み合わせることで、より高度な制御が可能になります。特に、定常偏差を解消するために積分制御を併用することが一般的です。比例制御の特性を理解し、適切にゲインを調整することで、システムの最適化を図ることができます。
積分(I)制御の特徴
積分(I)制御は、PID制御の重要な要素の一つであり、システムの偏差の累積に基づいて制御を行う特徴を持ちます。比例制御(P)が現在の偏差に応じて即座に反応するのに対し、積分制御は過去の偏差の総和を考慮することで、定常偏差を解消する役割を果たします。例えば、温度制御システムにおいて、目標値と現在値の差が小さくても、長時間にわたって偏差が続く場合、積分制御はその累積された偏差を補正し、目標値に近づけることができます。
積分制御の利点は、長時間の偏差を解消できる点にありますが、一方で過剰な積分ゲインを設定すると、システムの応答が遅くなったり、オーバーシュートや振動を引き起こす可能性があります。そのため、積分ゲインの調整は慎重に行う必要があります。適切な積分ゲインを設定することで、システムの安定性と精度を向上させることが可能です。積分制御は、特に定常状態での精度が求められるシステムにおいて、重要な役割を果たします。
微分(D)制御の特徴
微分(D)制御は、PID制御の重要な要素の一つであり、システムの応答速度と安定性を向上させる役割を担っています。微分制御は、偏差の変化率に基づいて制御量を調整します。具体的には、偏差が急激に変化している場合に、その変化を抑制する方向に作用することで、システムの過剰な反応を防ぎます。これにより、オーバーシュートや振動を軽減し、システムの安定性を高めることができます。
微分制御の効果は、特に高速応答が求められるシステムで顕著です。例えば、ロボットの制御や自動車のサスペンションシステムなど、瞬間的な変化に対応する必要がある場面で有効です。ただし、微分制御はノイズに対して敏感であるため、過度にゲインを高めるとシステムが不安定になる可能性があります。そのため、ゲイン調整を行う際には、システムの特性やノイズの影響を考慮しながら、適切な値を設定することが重要です。
微分制御を適切に活用することで、システムの応答速度と安定性を両立させることが可能です。しかし、その効果を最大限に引き出すためには、他の制御要素である比例(P)制御や積分(I)制御とのバランスを考慮する必要があります。これにより、システム全体の最適化が図られ、効率的な制御が実現されます。
ゲイン調整の重要性
ゲイン調整は、制御システムの性能を最適化する上で極めて重要なプロセスです。ゲインは、システムの入力に対する出力の増幅率を表し、適切に調整することで、システムの応答速度や安定性を向上させることができます。特に、PID制御においては、比例(P)、積分(I)、微分(D)の各ゲインを適切に設定することが、目標値への追従性能や外乱に対するロバスト性を決定します。
ゲインが高すぎると、システムは過剰に反応し、オーバーシュートや振動が発生する可能性があります。逆に、ゲインが低すぎると、システムの応答が遅くなり、目標値に到達するまでに時間がかかることがあります。したがって、最適なゲイン値を見つけることが、システムの性能を最大限に引き出す鍵となります。
ゲイン調整のプロセスでは、実際のシステムの挙動を観察しながら、試行錯誤を繰り返すことが一般的です。また、シミュレーションやモデルベース設計を活用することで、より効率的にゲインを調整することが可能です。これらの手法を駆使して、システムの特性に応じた最適なゲイン設定を行うことが、制御システムの設計において不可欠です。
システム最適化のためのゲイン調整手法
ゲイン調整は、制御システムの性能を最適化する上で重要なプロセスです。ゲインとは、システムの入力に対する出力の増幅率を表すパラメータであり、適切に調整することでシステムの応答速度や安定性を向上させることができます。特に、PID制御においては、比例ゲイン(P)、積分ゲイン(I)、微分ゲイン(D)の3つの要素を調整することで、システムの挙動を細かく制御することが可能です。
比例ゲイン(P)は、偏差に比例して制御量を決定するため、応答速度を速める効果がありますが、過剰に大きくするとシステムが不安定になる可能性があります。積分ゲイン(I)は、過去の偏差の累積を考慮することで、定常偏差を解消する役割を果たします。一方、微分ゲイン(D)は、偏差の変化率に基づいて制御量を調整し、システムの過剰な振動を抑える効果があります。
これらのゲインを最適に調整するためには、システムの特性を理解し、試行錯誤を繰り返すことが重要です。ゲイン調整のプロセスでは、シミュレーションや実機でのテストを通じて、システムの応答を確認しながらパラメータを微調整します。これにより、目標値への追従性や外乱に対するロバスト性を高めることができ、結果としてシステム最適化が実現されます。
まとめ
フィードバック制御とPID制御は、制御工学において重要な概念です。フィードバック制御は、システムの出力を目標値と比較し、その偏差に基づいて入力値を調整することで、システムの安定性や精度を向上させる手法です。これにより、外部からの擾乱やシステム内部の変動に対しても、目標値に近づけることが可能となります。
PID制御は、フィードバック制御の一種で、比例(P)、積分(I)、微分(D)の3つの要素を組み合わせて制御を行います。比例制御は偏差に比例した制御量を出力し、積分制御は過去の偏差の蓄積を考慮し、微分制御は偏差の変化率に基づいて制御量を決定します。これにより、システムの応答速度や安定性を最適化することができます。
ゲインは、システムの入力に対する出力の増幅率を表します。適切なゲイン調整を行うことで、システムの性能を向上させることが可能です。例えば、比例ゲインを高く設定すると応答速度が向上しますが、過度に高くするとシステムが不安定になる可能性があります。積分ゲインや微分ゲインも同様に、適切に調整することでシステムの特性を最適化できます。
これらの概念を理解し、適切に適用することで、効率的で効果的な制御システムを設計することが可能となります。特に、ゲイン調整はシステムの性能を左右する重要な要素であり、慎重に行う必要があります。
よくある質問
フィードバック制御とは何ですか?
フィードバック制御とは、システムの出力を測定し、その結果を目標値と比較して誤差を計算し、その誤差を基に制御を行う手法です。このプロセスにより、システムの安定性や精度が向上します。フィードバック制御は、温度制御や速度制御など、さまざまな産業で広く利用されています。誤差を最小化することで、システムの性能を最適化することが可能です。
PID制御の「P」「I」「D」は何を意味しますか?
PID制御は、比例(P)、積分(I)、微分(D)の3つの要素から構成されています。比例制御(P)は、誤差に比例して制御量を調整します。積分制御(I)は、過去の誤差の累積を考慮し、定常偏差を解消します。微分制御(D)は、誤差の変化率に基づいて制御量を調整し、システムの応答速度を向上させます。これらの要素を組み合わせることで、システムの安定性と応答性が向上します。
ゲイン調整の重要性は何ですか?
ゲイン調整は、PID制御においてシステムの性能を最適化するために非常に重要です。比例ゲイン(Kp)、積分ゲイン(Ki)、微分ゲイン(Kd)を適切に設定することで、システムの応答速度や安定性が向上します。ゲインが高すぎるとシステムが不安定になり、低すぎると応答が遅くなります。そのため、最適なゲイン値を見つけることが、システムの性能を最大化する鍵となります。
PID制御をどのようにシステムに適用しますか?
PID制御をシステムに適用するには、まずシステムの特性を理解し、適切な制御目標を設定する必要があります。次に、比例ゲイン(Kp)、積分ゲイン(Ki)、微分ゲイン(Kd)を調整し、システムの応答を最適化します。調整プロセスでは、シミュレーションや実験を通じて、システムの挙動を確認しながらゲインを微調整します。最終的に、安定した制御が達成されるように調整を行います。
コメントを残す
コメントを投稿するにはログインしてください。
関連ブログ記事